





●高性能ACサーボモータは、最終製品の大深度から取り出すことができ、製品の多様化を除去する;超高速抽出時間が大幅に生産効率を向上させます。
●高剛性三次元構造設計、安定した構造の振動耐久性と長寿命。 。
●耐摩耗性、専用の高速高精度リニアスライドを用いて、耐熱性、長い寿命が変形しません。
●倍速ベルトを確保するために要する時間と高剛性押出アルミニウムビーム、光品質、高い剛性を有するアーム構造。
●T型ワイヤは、PUベルトドライブ、良好な安定性、0.15ミリメートル±位置決め精度の再現性を歯。
| モデルモデル | R600 IS / ID / WS / WD-S3 / S5 |
R700 IS / ID / WS / WD-S3 / S5 |
R800 IS / ID / WS / WD-S3 / S5 |
R900 IS / ID / WS / WD-S3 / S5 |
R1000 WS / WD-S3 / S5 |
R1100 WS / WD-S3 / S5 |
R1200 WS / WD-S3 / S5 |
R1400 WS / WD-S3 / S5 |
||||||||||||||||
| 電力容量(KVA) | 1.5 / 2 | 1.5 / 2 | 1.5 / 2 | 1.5 / 2 | 2.4 / 2.9 | 2.4 / 2.9 | 2.4 / 2.9 | 3 | ||||||||||||||||
| 該当する成形機(トン) | 50-150 | 80-200 | 120から250 | 200から350 | 350〜450 | 350から550 | 350-600 | 600-800 | ||||||||||||||||
| 横行旅(MM) | 1300 | 1500 | 1800 | 2000 | ||||||||||||||||||||
| スタッブスの旅(MM) | S3:P:655 S5:P:470 R:435&NBSP。 |
S3:P:655 S5:P:470 R:435&NBSP。 |
S3:P: 715 S5:P:530 R:515&NBSP。 |
S3:P: 715 S5:P:530 R:515&NBSP。 |
S3:P:800 S5:P:610 R:600&NBSP。 |
S3:P:800 S5:P:610 R:600&NBSP。 |
S3:P:980 S5:P:790 R:770 |
S3:P:980 S5:P:790 R:770 |
||||||||||||||||
| 上下ストローク(MM) | 600 | 700 | 800 | 900 | 1000年 | 1100 | 1200 | 1400 | ||||||||||||||||
| 最大負荷(キログラム) | 5 | 5 | 5 | 5 | 10 | 10 | 10 | 10 | ||||||||||||||||
| タイムアウト(SEC) | 1.3 | 1.4 | 1.5 | 1.5 | 1.6 | 1.6 | 1.7 | 1.8 | ||||||||||||||||
| フルサイクルタイム(SEC) | 5.5 | 5.7 | 5.8 | 6 | 6.5 | 6.7 | 7 | 7.2 | ||||||||||||||||
| エア消費量(NI /サイクル) | 3 | 3 | 3 | 3 | 5 | 5 | 5 | 5 | ||||||||||||||||
| 正味重量(キログラム) | 260から280 | 270から290 | 300-350 | 310-360 | 420から470 | 440から490 | 450から510 | 480から540 | ||||||||||||||||
Air pressure scissors: Air pressure scissors can be installed for runner cutting.
Photoelectric inspection on finished products: The sensor can be installed at the conveyor. Place the finished product on the conveyor to avoid hitting among products.
Tricolor light: Installed with tricolor light, the user can easily check the robot operating state from a distance to workshop management. It can also distinguish the condition of the robots in auto, manual, or failure status.
Quick EOAT changing: To reallize the quick separation of the EOAT and the robot. It’s simple and can save EOAT changing time.
A&C axis servo driven: The end of arm rotary mechanism can be driven by AC servo motor with multiple angle and gestures.
Middle plate inspection: Position of the middle plate should be checked after the mold opened the end position to avoid the runner arm from hitting middle platen.
Lubrication function: Manual central lubrication or auto lubrication can be equipped. For auto lubrication, when robot running times achieve a setting value, it will lubricate automatically.
 |
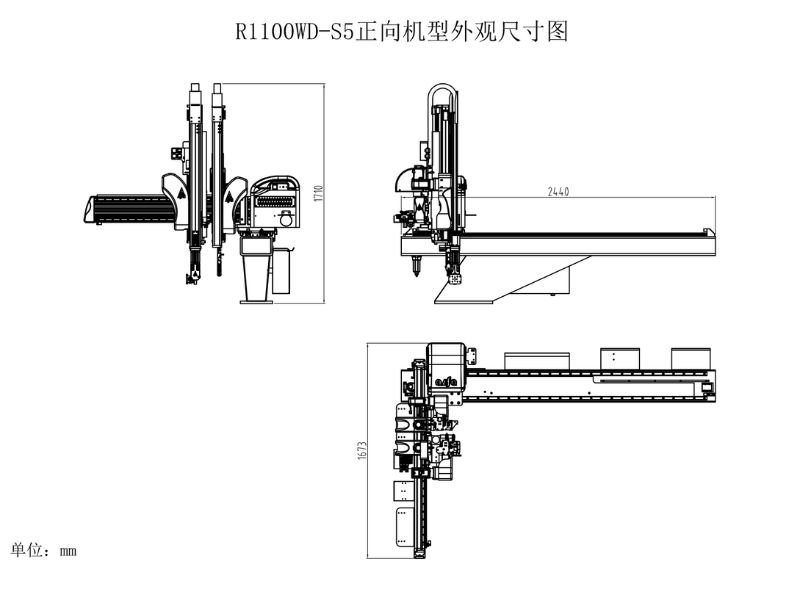 |
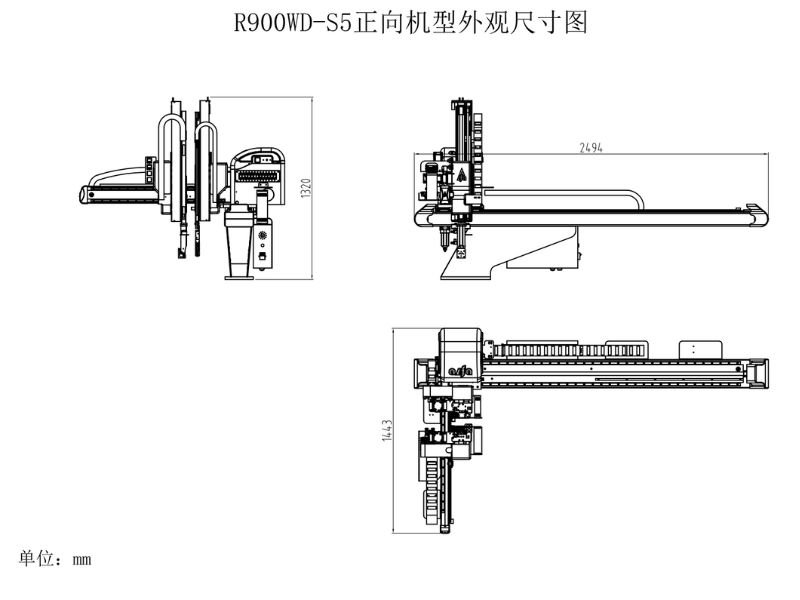
| R900WD-S5 | R1100WD-S5 |
 |
 |
 |
 |
 |
 |









